
Categories
- Our Blog (243)
- Technology Support (23)
- Tools Published (0)

In recent years, the application cases of industrial robots in China have increased rapidly, mainly focusing on welding, spraying, handling and other fields, and there are not many applications in bending. Workpiece bending is a kind of work that is widely used and has a certain degree of danger, so the market prospect of robot bending is very optimistic, and there are many successful experiences abroad.
At present, 40% to 50% of the sheet metal processing workshops in Europe and the United States are equipped with robotic automatic bending systems, while China’s bending automation is just starting. In the next 10 years, the demand for bending robots in China will be on a straight upward trend.
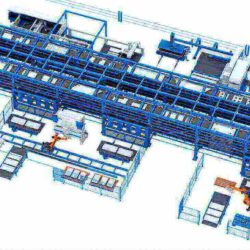
CNC sheet bending flexible processing cell with robot as the core executive component is a set of highly automated equipment combination, with the advantages of high efficiency, high quality and high flexibility. In the bending flexible processing cell, choosing the right combination of components can provide better support for processing efficiency and flexibility.
Bending accuracy depends on the accuracy of the bending machine itself, the positioning accuracy of the robot, and the cooperative control between the robot and the bending machine; the difficulty of cooperative control lies in the speed matching between the robot and the bending machine, and the running trajectory of the robot holding the workpiece; poor following effect will seriously affect the bending angle forming effect and the flatness of the plate, thus affecting the quality of the finished product.
Grippers are the “hands” of robots that replace manual labor and pick and place workpieces. The gripper of a bending robot is generally composed of multiple suction cups mounted on a metal frame.
The loading and unloading tables usually use stacking pallets, but also use conveyor belts or roller tracks to transport raw materials and transfer finished products as a unit. Oily sheets are prone to sticking, resulting in picking up multiple sheets at a time. Various sheeting devices (such as magnetic sheeters) and detection sensors can be added next to the loading table to ensure that the sheets are grabbed as a single sheet.
The positioning table is an inclined platform with baffled edges and slightly raised balls distributed on the table surface. The robot transfers the sheet onto the positioning table and the sheet slides freely by gravity onto the baffle. Since the position of the positioning table and the baffle are fixed, the position of the plate and the gripper are fixed with relative precision when the robot regrasps the plate, providing a benchmark for the next bending step.
The flip frame is a fixed frame for the gripping device. When the robot needs to change the position to pick up the workpiece, it can put the workpiece on the flip frame to fix it, and the robot can re-grip the workpiece in the new position. In some special occasions, it is also possible to change the gripping position after clamping the workpiece using the bending machine tooling.
Currently on the market, whether it is a general-purpose standard six-axis robot, or a bending-specific robot optimized for the bending process in terms of robot arm span or shape, all require bending following algorithm support, and there are very few cases where bending is not followed. Without good following, the fixture or suction cup gripper will pull the workpiece due to poor following trajectory, forming wrinkles in the sheet and affecting the forming quality. Establishing an accurate robot bending following motion model can help establish a good following trajectory algorithm to obtain excellent following results.
 On the importance of human resources for intelligent manufacturing of sheet metal
On the importance of human resources for intelligent manufacturing of sheet metal High-precision CNC bending machine maintenance and working condition
High-precision CNC bending machine maintenance and working condition CNC Press Brake failure how to do
CNC Press Brake failure how to do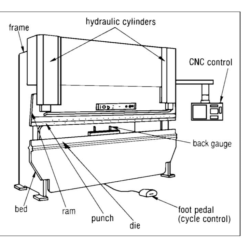 Large double machine linkage CNC Press Brake technology
Large double machine linkage CNC Press Brake technology Precautions for the use of hydraulic shearing machine
Precautions for the use of hydraulic shearing machine
